网络层
基类
然后就是一些用于更改这层网络属性的函数:
set_train_mode用来修改目前的模式resize用来更改batch_sz_resize是一个回调函数,对于自定义的网络层,如果需要根据batch_sz的大小而调整某些东西,可以重写这个函数。
forward用来前向传播backward用来反向传播,其中第一个参数是上一层网络的输出,第二个参数是下一层网络返回的梯度clear_grad里写每次反向传播,把梯度数组清零的数组read用于从一个输入流读取网络参数,write用于把网络参数输出到一个流,注意传入的流都是二进制流upd传入一个优化器,用这个优化器来优化网络参数
线性层
struct linear : public layer {
const int in_sz, out_sz;
// 系数,系数梯度
mat weight, grad_weight;
vec bias, grad_bias;
linear(int in_sz, int out_sz)
: layer("linear " + to_string(in_sz) + " -> " + to_string(out_sz))
, in_sz(in_sz)
, out_sz(out_sz)
, weight(out_sz, in_sz)
, grad_weight(out_sz, in_sz)
, bias(out_sz)
, grad_bias(out_sz) {
bias.setZero();
for (auto &i : weight.reshaped()) i = nd(0, sqrt(2. / in_sz));
}
void forward(const vec_batch &in) {
for (int i = 0; i < batch_sz; i++) out[i] = weight * in[i] + bias;
}
weight和grad_weight分别为权值矩阵和权值矩阵的梯度。bias和bias_weight分别为梯度向量和梯度向量的梯度。
默认采用 Kaiming He 初始化初始化系数: $$ W \sim \mathcal N(0,\sqrt {\frac 2{\text{输入向量长度}}}) $$
线性层的正向传播: $$ O=W \cdot I + B $$
void clear_grad() {
grad_weight.setZero();
grad_bias.setZero();
}
void backward(const vec_batch &in, const vec_batch &nxt_grad) {
for (int i = 0; i < batch_sz; i++) {
grad_bias += nxt_grad[i];
grad_weight += nxt_grad[i] * in[i].transpose();
grad[i] = weight.transpose() * nxt_grad[i];
}
grad_weight /= batch_sz;
grad_bias /= batch_sz;
}
void upd(optimizer &opt) {
opt.upd(to_vecmap(weight), to_vecmap(grad_weight));
opt.upd(to_vecmap(bias), to_vecmap(grad_bias));
}
void write(ostream &io) {
for (auto &i : weight.reshaped()) io.write((char *)&i, sizeof(i));
for (auto &i : bias.reshaped()) io.write((char *)&i, sizeof(i));
}
void read(istream &io) {
for (auto &i : weight.reshaped()) io.read((char *)&i, sizeof(i));
for (auto &i : bias.reshaped()) io.read((char *)&i, sizeof(i));
}
};
线性层的反向传播: $$ \begin{aligned} grad(B_i)&=grad(I_{i+1})\cr grad(W_i)&=grad(I_{i+1})\cdot I_i^T\cr grad(I_i)&=W_i^T\cdot grad(I_{i+1}) \end{aligned} $$
批归一化层
struct batchnorm : public layer {
// 平均值,方差
vec mean, running_mean, grad_mean;
vec var, running_var, grad_var, inv_var;
vec gama, grad_gama;
vec beta, grad_beta;
// 这两个用来辅助,inv记录1/sqrt(方差+eps)
vec grad_normalized_x;
const float momentum;
batchnorm(int sz, float momentum = 0.9)
: layer("batchnorm " + to_string(sz))
, mean(sz)
, running_mean(sz)
, grad_mean(sz)
, var(sz)
, running_var(sz)
, grad_var(sz)
, inv_var(sz)
, gama(sz)
, grad_gama(sz)
, beta(sz)
, grad_beta(sz)
, momentum(momentum) {
gama.setOnes();
beta.setZero();
}
大多数变量都可以根据名字看出意义。
特别的,gama 初始化为 1。beta 初始化为 0。批归一化层一般都这么初始化
void forward(const vec_batch &in) {
if (train_mode) {
mean.setZero();
var.setZero();
for (int i = 0; i < batch_sz; i++) mean += in[i];
mean /= batch_sz;
for (int i = 0; i < batch_sz; i++) var += (in[i] - mean).cwiseAbs2();
var /= batch_sz;
inv_var = rsqrt(var.array() + EPS);
running_mean = running_mean * momentum + mean * (1 - momentum);
// 使用无偏方差
// running_var = running_var * momentum + var * batch_sz / (batch_sz - 1) * (1 - momentum);
running_var = running_var * momentum + var * (1 - momentum);
for (int i = 0; i < batch_sz; i++)
out[i] = (in[i] - mean).array() * inv_var.array() * gama.array() + beta.array();
} else {
for (int i = 0; i < batch_sz; i++)
out[i] =
(in[i] - running_mean).array() * rsqrt(running_var.array() + EPS) * gama.array() + beta.array();
}
}
batch norm 层前向传播(训练时实时计算方差平均值,预测时使用方差的移动平均计算):

求方差的移动平均时,使用无偏还是有偏方差这点暂无定论,原论文是无偏,但是各种框架里似乎怎么写的都有,这里采用有偏方差。
void backward(const vec_batch &in, const vec_batch &nxt_grad) {
for (int i = 0; i < batch_sz; i++) {
grad_normalized_x = nxt_grad[i].array() * gama.array();
grad_var.array() += grad_normalized_x.array() * (in[i] - mean).array();
grad_mean.array() += grad_normalized_x.array();
grad[i] = grad_normalized_x.array() * inv_var.array();
grad_beta.array() += nxt_grad[i].array();
grad_gama.array() += nxt_grad[i].array() * (in[i] - mean).array() * inv_var.array();
}
grad_var = -0.5 * grad_var.array() * inv_var.array().cube();
grad_mean = -grad_mean.array() * inv_var.array();
for (int i = 0; i < batch_sz; i++)
grad[i].array() += (grad_mean.array() + 2 * grad_var.array() * (in[i] - mean).array()) / batch_sz;
grad_beta /= batch_sz;
grad_gama /= batch_sz;
}
batch normalization 的反向传播

void clear_grad() {
grad_gama.setZero();
grad_beta.setZero();
grad_mean.setZero();
grad_var.setZero();
}
void upd(optimizer &opt) {
opt.upd(to_vecmap(beta), to_vecmap(grad_beta));
opt.upd(to_vecmap(gama), to_vecmap(grad_gama));
}
void write(ostream &io) {
for (auto &i : gama.reshaped()) io.write((char *)&i, sizeof(i));
for (auto &i : beta.reshaped()) io.write((char *)&i, sizeof(i));
for (auto &i : running_mean.reshaped()) io.write((char *)&i, sizeof(i));
for (auto &i : running_var.reshaped()) io.write((char *)&i, sizeof(i));
}
void read(istream &io) {
for (auto &i : gama.reshaped()) io.read((char *)&i, sizeof(i));
for (auto &i : beta.reshaped()) io.read((char *)&i, sizeof(i));
for (auto &i : running_mean.reshaped()) io.read((char *)&i, sizeof(i));
for (auto &i : running_var.reshaped()) io.read((char *)&i, sizeof(i));
}
};
batch norm 层不仅需要保存权值,还需要保存算出来的移动平均
卷积层
ten3 hi_dim_conv(const ten3 &input, const ten4 &kernel, ten3 &res) {
int sz1 = input.dimension(1) - kernel.dimension(2) + 1;
int sz2 = input.dimension(2) - kernel.dimension(3) + 1;
res = ten3(kernel.dimension(1), sz1, sz2);
res.setZero();
for (int i = 0; i < kernel.dimension(0); i++)
for (int j = 0; j < kernel.dimension(1); j++)
res.chip(j, 0) += input.chip(i, 0).convolve(kernel.chip(i, 0).chip(j, 0), Eigen::array<int, 2>{0, 1});
return res;
}
这里用 Eigen 自带的二维卷积写了一个 3 维度卷积的函数。
struct conv : public layer {
const int in_channel, out_channel, in_rows, in_cols;
const int out_rows, out_cols;
const int k_rows, k_cols;
ten4 kernel, grad_kernel;
vec bias, grad_bias;
conv(int in_channel, int out_channel, int in_rows, int in_cols, int k_rows, int k_cols)
: layer("conv " + to_string(in_channel) + " channels * " + to_string(in_rows) + " * " + to_string(in_cols) +
" -> " + to_string(out_channel) + " channels * " + to_string(in_rows - k_rows + 1) + " * " +
to_string(in_cols - k_cols + 1))
, in_channel(in_channel)
, out_channel(out_channel)
, in_rows(in_rows)
, in_cols(in_cols)
, out_rows(in_rows - k_rows + 1)
, out_cols(in_cols - k_cols + 1)
, k_rows(k_rows)
, k_cols(k_cols)
, kernel(in_channel, out_channel, k_rows, k_cols)
, grad_kernel(in_channel, out_channel, k_rows, k_cols)
, bias(out_channel)
, grad_bias(out_channel) {
bias.setZero();
for (int i = 0; i < in_channel; i++)
for (int j = 0; j < out_channel; j++)
for (int k = 0; k < k_rows; k++)
for (int l = 0; l < k_cols; l++)
kernel(i, j, k, l) = nd(0, sqrt(2. / (in_channel * in_rows * in_cols)));
}
依然是 He 初始化,这里 fan_in 即与每个权值相乘的输入的个数应该是 in_channel * in_rows * in_cols。
void forward(const vec_batch &in) {
for (int i = 0; i < batch_sz; i++) {
vec tmp_vec = in[i];
ten3 tensorout;
hi_dim_conv(ten3map(tmp_vec.data(), in_channel, in_rows, in_cols), kernel, tensorout);
for (int j = 0; j < out_channel; j++) tensorout.chip(j, 0) = tensorout.chip(j, 0) + bias[j];
out[i] = to_vecmap(tensorout);
}
}
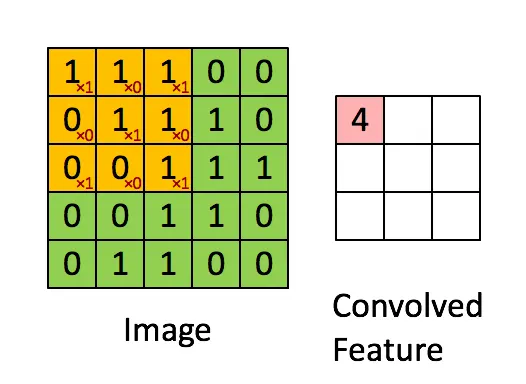
这里进行的是完全卷积,卷积层前向传播: $$ O=I\otimes W+B $$
void clear_grad() {
grad_bias.setZero();
grad_kernel.setZero();
}
void backward(const vec_batch &in, const vec_batch &nxt_grad) {
for (int i = 0; i < batch_sz; i++) {
vec _nxt_grad = nxt_grad[i], _in = in[i];
grad[i].resize(in[0].size());
ten3map grad_out(_nxt_grad.data(), out_channel, out_rows, out_cols);
ten3map grad_in(grad[i].data(), in_channel, in_rows, in_cols);
ten3map in_map(_in.data(), in_channel, in_rows, in_cols);
grad_in.setZero();
for (int j = 0; j < out_channel; j++) {
grad_bias(j) += ten0(grad_out.chip(j, 0).sum())();
for (int k = 0; k < in_channel; k++) {
// 转180°的卷积核
ten2 rot_kernel = kernel.chip(k, 0).chip(j, 0).reverse(Eigen::array<bool, 2>{true, true});
ten2 in_ten = grad_out.chip(j, 0).pad(Eigen::array<pair<int, int>, 2>{
pair<int, int>{k_rows - 1, k_rows - 1}, pair<int, int>{k_cols - 1, k_cols - 1}});
grad_in.chip(k, 0) += in_ten.convolve(rot_kernel, Eigen::array<int, 2>{0, 1});
// (i,j)--(k,l)-->(i-k,j-l)
grad_kernel.chip(k, 0).chip(j, 0) +=
in_map.chip(k, 0).convolve(grad_out.chip(j, 0), Eigen::array<int, 2>{0, 1});
}
}
}
grad_bias /= batch_sz;
grad_kernel = grad_kernel / (float)batch_sz;
}
卷积层的反向传播,较为复杂。 参考这个网站
激活函数层
这里以 sigmoid 为例:
struct sigmoid : public layer {
sigmoid() : layer("sigmoid") {}
void forward(const vec_batch &in) {
for (int i = 0; i < batch_sz; i++)
out[i] = in[i].unaryExpr([](float x) -> float { return 1. / (exp(-x) + 1); });
}
void backward(const vec_batch &in, const vec_batch &nxt_grad) {
for (int i = 0; i < batch_sz; i++)
grad[i] = nxt_grad[i].cwiseProduct(out[i].unaryExpr([](float x) -> float { return x * (1. - x); }));
}
};
sigmoid 层前向传播 $$ O=\frac 1{e^{-I}+1} $$ 反向传播( 表示逐位相乘) $$ grad(I_i)=grad(I_{i+1})I_i*(1-I_i) $$